Proposal Pembuatan "Line Follower Analog"
I. LATAR BELAKANG
Saat ini sarana elektronika banyak dipakai dibidang dalam segala bidang kehidupan. Melesatnya perkembangan teknologi elektronika saat ini dapat kita amati dari peningkatan kebutuhan masyarakat akan peralatan elektronik. Dapat terlihat dari maraknya barang elektronik yang mendukung perkembangan dibidang tersebut.
Dilihat lebih jauh perkembangan barang elektronika yang banyak dicari dan diminati oleh masyarakat adalah yang memiliki nilai jual serta dapat diaplikasikan dengan mudah penggunaannya di lapangan. Pengambilan tema Line Follower adalah sebagai bahan pembelajaran bagaimana kita mengetahui prinsip kerja dari rangkaian line follower serta kugunannya dalam aplikasi alat yang sesungguhnya.
II. TUJUAN
Untuk memenuhi tugas akhir elektronika 2, dan syarat agar mendapatkan nilai yang memuaskan dalam mata kuliah elektronika 2, serta dapat mengikuti Ulangan Akhir Semester.
III. TEORI
Line Follower adalah robot sederhana yang dapat berjalan mengikuti garis, robot ini di desain untuk pemula dan menjadi robot pertama anda untuk belajar mengenai sistem kendali robot, melalui robot ini anda juga dapat mempelajari atau mengaplikasikan algoritma (AI) untuk sistem kendalinya. Robot ini dilengkapi dengan 3 buah sensor sebagai indera penglihatan terhadap garis, 3 sensor itu di pasang di sebelah kiri, kanan dan tengah, anda dapat menggunakan sensor ini sebagai pemicu kendali motor kanan dan kiri yang juga dapat di kendalikan melalui program. Line Follower ROBOT dirancang yang menggunakan dua motor kontrol roda belakang dan roda depan tunggal bebas. Ini memiliki sensor 4-inframerah pada bagian bawah untuk mendeteksi pita hitam pelacakan, ketika sensor mendeteksi warna hitam, output dari komparator, LM324 adalah logika rendah dan yang lainnya output tinggi.
IV. ALAT DAN BAHAN
- Mikrokontroler AT89C2051
- Bridge driver L293D H
- Motor DC
- ICLM324
- Sensor Photo Dioda
- Prototype Line Follower
V. GAMBAR RANGKAIAN
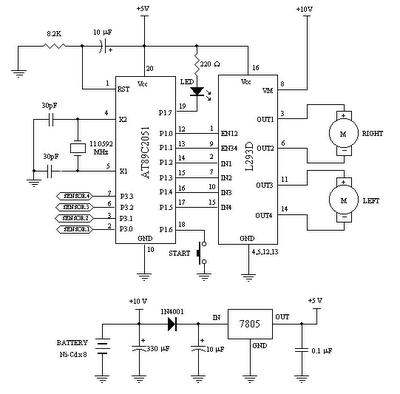
Rangkaian Line Follower
Sensor Photo Dioda
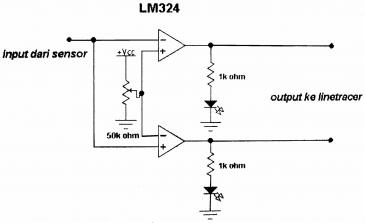
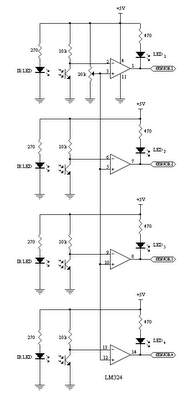
Rangkaian Komparator IC LM324

Rangkaian Motor DC
VI. LANGKAH KERJA
1. Pertama-tama kita persiapkan terlebih dahulu semua peralatan yang dibutuhkan. Siapkan PCB terlebih dahulu.
2. Setelah PCB terbentuk kita mulai memasang satu persatu komponen yang ada dimulai dari komponen yang berbentuk kecil dan tergolong komponen yang tidak aktif setelah itu baru memasang komponen yang aktif .
3. Setelah semua komponen terpasang periksa kembali rangkaian sesuai dengan skema rangkaian.
4. Setelah itu sambungkan ke sumber daya dan uji rangkaian tersebut.
VII. CARA KERJA
A. Prinsip Kerja Sensor
Sensor yang digunakan terdiri dari photo dioda. Sensor ini nilai resistansinya akan berkurang bila terkena cahaya dan bekerja pada kondisi riverse bias. Untuk sensor cahayanya digunakan LED Superbright, komponen ini mempunyai cahaya yang sangat terang, sehingga cukup untuk mensuplai cahaya ke photo dioda.
Cara kerjanya : Jika photo dioda tidak terkena cahaya, maka nilai resistansinya akan besar atau dapat kita asumsikan tak hingga. Sehingga arus yang mengalir pada komparator sangat kecil atau dapat diasumsikan dengan logika 0.
Jika photo dioda terkena cahaya, maka photo dioda akan bersifat sebagai sumber tegangan dan nilai resistansinya akan menjadi kecil, sehingga akan ada arus yang mengalir ke komparator dan berlogika 1.
B. Prinsip Kerja Komparator
Komparator pada rangaian ini menggunakan IC LM 324 yang didalamnya berisi rangkaian Op Amp digunakan untuk membandingkan input dari sensor. Dimana input akan dibandingkan dari Op Amp IC LM 324 yang output berpulsa high. Sehingga tidak perlu adanya pull up pada outputnya. IC ini dapat bekerja pad range 3 volt sampai 30 volt dan dapat bekerja dengan normal mulai tegangan 6 volt.
Dalam rangkaian ini juga terdapat 4 LED, yang berfungsi sebagai indikator. Untuk mengatur tagangan pada pembanding, disambungkan Variable Resistor (VR) diantara kedua OP Amp IC LM 324.
- Jika tidak ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini adalah 0 Volt, akibatnya pada IC 1 tegangan di terminal ( + ) > ( – ), maka LED-A on, sedangkan pada IC 2 sebaliknya LED-B off.
- Jika ada arus yang mengalir dari rangkaian sensor ke rangkaian ini maka tegangan masukan untuk rangkaian ini mendekati Vcc, akibatnya pada IC 2 tegangan di terminal ( + ) < ( – ), maka LED-B on, sedangkan pada IC 1 sebaliknya maka LED-A off.
C. Prinsip Kerja Driver Motor
Driver adalah rangkaian yang tersusun dari transistor yang digunakan untuk menggerakkan motor DC. Dimana komponen utamanya adalah transistor yang dipasang sesuai karakteristiknya.
Pada saat input A berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 1 dan 4 on karena basis terbias, sehingga motor berputar. Sehingga saat input A berlogika 1 maka input B akan berlogika 0, jadi transistor 2 dan 3 akan off.
Pada saat input B berlogika 1, maka ada arus yang mengalir pada rangkaian, akibatnya transistor 2 dan 3 on karena basis terbias, sehingga motor berputar tapi dengan arah yang berlawanan.
VIII. KESIMPULAN
Rangkaian robot Line Follower bekerja dengan 2 motor DC penggerak dengan Mikrokontroller AT89C2051 dan-Bridge driver L293D H yang digunakan untuk mengontrol arah dan kecepatan motor. Dengan sensor photo diode yang dipasangkan pada prototype, sehingga robot akan bergerak mengikuti jalur dari garis yang dibuat.Sumber : http://www.dendicious.com/2013/07/kumpulan-proposal-proyek-elektronika.html
Tidak ada komentar:
Posting Komentar